Collaborated with a team of four to design and build Paxton, an autonomous robot engineered to navigate a complex obstacle course featuring line following, staircases, uneven terrain (Giant’s Causeway), the Lava Pit of Doom, and a zipline descent.
Code: https://github.com/MightyBrushwagg/Robotics-Challenge
LinkedIn: https://www.linkedin.com/feed/update/urn:li:activity:7348353328143065088/
Key Technical Innovations:
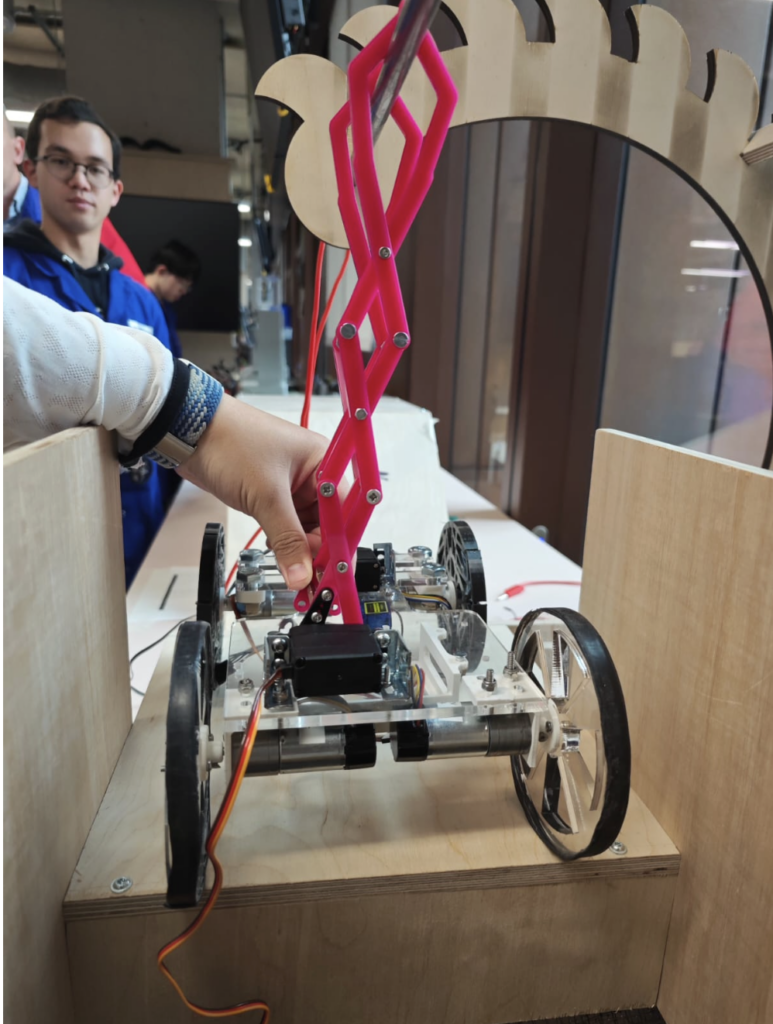
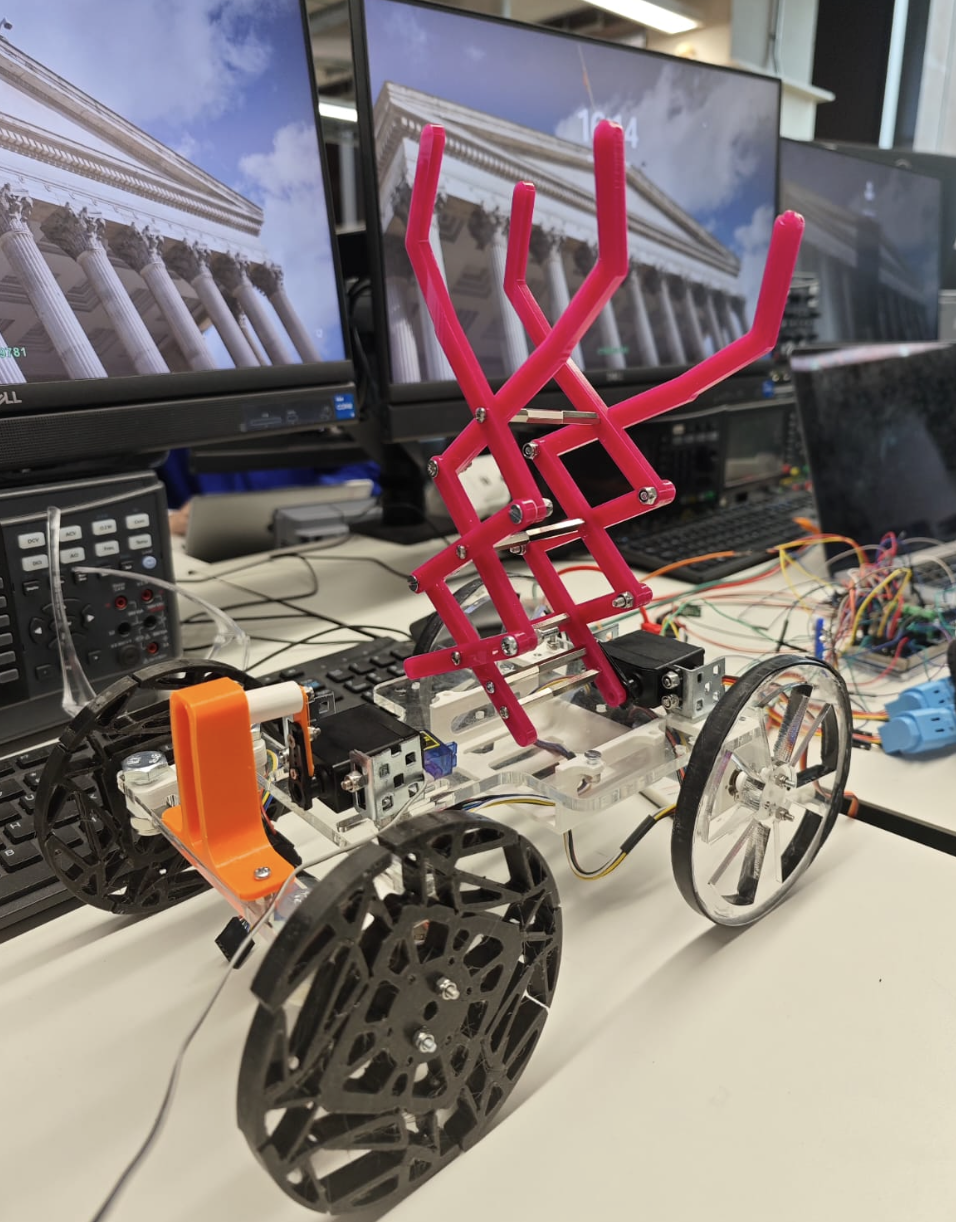
- Integrated cutting-edge PaTS (Passive Terrain System) wheels from Imperial College London’s Morph Lab, enabling passive obstacle climbing without additional sensors or actuators
- Designed a hybrid locomotion system combining differential drive with Ackermann steering geometry for enhanced turning precision and stability
- Developed custom control algorithms for autonomous line following and wall following navigation
Technical Approach:
The robot’s architecture centered on mechanical simplicity paired with intelligent control systems. The PaTS wheel technology allowed Paxton to adaptively traverse stairs and rocky terrain through passive compliance, while our dual steering approach provided the maneuverability needed for precise course navigation.
Challenge & Problem-Solving:
Faced a critical system failure 24 hours before competition when the robot ceased line-following operations. Led troubleshooting efforts through complete system rewiring, successfully identifying and resolving the fault to restore full functionality before the final challenge.
Results:
- 4th place out of 11 competing teams
- First team to successfully complete both the Lava Pit and Zipline obstacles
- Project featured on UCLCS and UCL official Instagram channels
Technologies: Robotics control systems, autonomous navigation, sensor integration, differential drive, Ackermann steering